45 learning to drive from simulation without real world labels
Learning to Drive from Simulation without Real World Labels - CORE We are not allowed to display external PDFs yet. You will be redirected to the full text document in the repository in a few seconds, if not click here.click here. Learning Interactive Driving Policies via Data-driven Simulation Search ACM Digital Library. Search Search. Advanced Search
en.wikipedia.org › wiki › Educational_technologyEducational technology - Wikipedia Educational technology is an inclusive term for both the material tools, processes, and the theoretical foundations for supporting learning and teaching.Educational technology is not restricted to high technology but is anything that enhances classroom learning in the utilization of blended, face to face, or online learning.

Learning to drive from simulation without real world labels
› section › learningThe Learning Network - The New York Times Mentor Texts How to Write a 100-Word Narrative: A Guide for Our Tiny Memoir Contest. Step-by-step directions for telling a meaningful, interesting and short true story from your life — with 25 ... Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels Authors: Alex Bewley Queensland University of Technology Jessica Rigley University of Cambridge Yuxuan Liu Jeffrey Hawke Wayve Abstract... Publications - Home Jeffrey Hawke et al. Urban Driving with Conditional Imitation Learning. Proceedings of the International Conference on Robotics and Automation (ICRA), 2020. ... Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall. Learning to Drive from Simulation without Real World Labels. Proceedings of the International Conference on ...
Learning to drive from simulation without real world labels. Yuxuan Liu | Papers With Code Learning to Drive from Simulation without Real World Labels. ... Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. ... Imitation learning is an effective approach for autonomous systems to acquire control policies when an explicit reward function is unavailable ... "Learning to Drive from Simulation without Real World Labels." - DBLP Bibliographic details on Learning to Drive from Simulation without Real World Labels. Stop the war! Остановите войну! ... "Learning to Drive from Simulation without Real World Labels." help us. How can I correct errors in dblp? ... Learning to Drive from Simulation without Real World Labels. ICRA 2019: 4818-4824. a service of ... Deep Reinforcement and Imitation Learning for Self-driving Tasks We split this approach in two main groups: 1) Behavioral Cloning (BC), which is a supervised learning approach to the problem, so we need a paired data set of states and actions; and 2) Inverse Reinforcement Learning (IRL), which aims to extract a reward function from the expert demonstrations to train a RL agent. skyengine.aiSKY ENGINE AI | Synthetic Data Cloud for Deep Learning in the ... Jun 01, 2020 · SKY ENGINE AI is a simulation and deep learning platform that generates fully annotated, synthetic data and trains AI computer vision algorithms at scale. The platform is architected to procedurally generate highly balanced imagery data of photorealistic environments and objects and provides advanced domain adaptation algorithms.
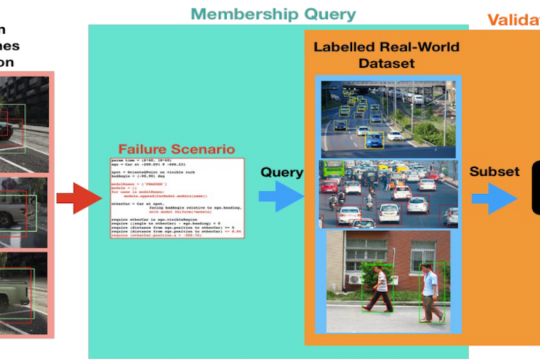
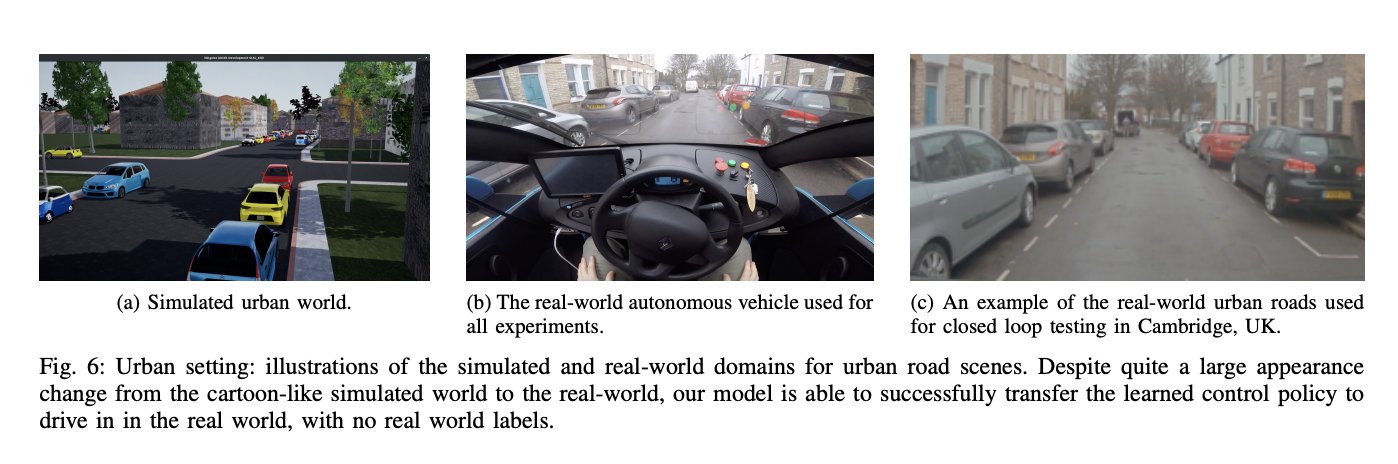
Edge Cases in Autonomous Vehicle Production - Datagen Comparison of simulated training and actual test environments in "Learning to Drive from Simulation without Real World Labels" (by Bewley et. al.) More recently, NVIDIA recently proposed a strategic approach named "imitation training" (Figure 7). Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam, Alex Kendall Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. Learning to Drive from Simulation without Real World Labels Abstract: Simulation can be a powerful tool for under-standing machine learning systems and designing methods to solve real-world problems. Training and evaluating methods purely in simulation is often "doomed to succeed" at the desired task in a simulated environment, but the resulting models are incapable of operation in the real world. Simulation-Based Reinforcement Learning for Real-World Autonomous Driving This work presents a method for transferring a vision-based lane following driving policy from simulation to operation on a rural road without any real-world labels and assesses the driving performance using both open-loop regression metrics, and closed-loop performance operating an autonomous vehicle on rural and urban roads. 55 Highly Influential
Sim2Real: Learning to Drive from Simulation without Real World Labels See the full sim2real blog: drive on real UK roads using a model trained entirely in simulation.Research paper: .... Learning Interactive Driving Policies via Data-driven Simulation ... the high-level pipeline of the proposed multi-agent data-driven simulation consists of (1) updating states for all agents, (2) recreating the world by projecting real-world image data to 3d space based on depth information, (3) configuring and placing meshes for all agents in the scene, (4) rendering the agent's viewpoint, and (5) post-processing … Technology | Wayve Learning to Drive from Simulation without Real World Labels. Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall. Proceedings of the International Conference on Robotics and Automation (ICRA). May, 2019. Learning to Drive in a Day. Learning to drive from a world on rails | DeepAI To support learning from pre-recorded logs, we assume that the world is on rails, meaning neither the agent nor its actions influence the environment. This assumption greatly simplifies the learning problem, factorizing the dynamics into a nonreactive world model and a low-dimensional and compact forward model of the ego-vehicle.
Agents, environments, scenarios: A framework for examining ...
Alex Bewley Learning to Drive from Simulation without Real World Labels. A method for transferring a vision-based lane following driving policy from simulation to operation on a rural road without any real-world labels. Our approach leverages recent advances in image-to-image translation to achieve domain transfer while jointly learning a single-camera ...
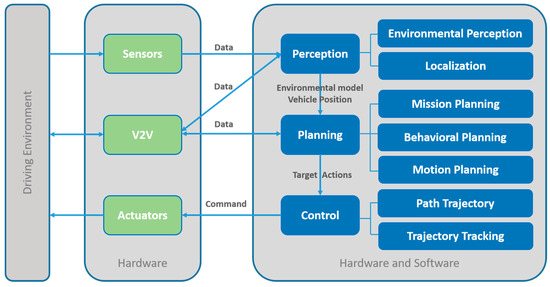
Sensors | Free Full-Text | A Systematic Review of Perception ...
Learning Interactive Driving Policies via Data-driven Simulation the high-level pipeline of the proposed multi-agent data-driven simulation consists of (1) updating states for all agents, (2) recreating the world by projecting real-world image data to 3d space based on depth information, (3) configuring and placing meshes for all agents in the scene, (4) rendering the agent's viewpoint, and (5) post-processing …

Sim2Real: Learning to Drive from Simulation without Real ...
Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam, Alex Kendall The authors are with Wayve in Cambridge, UK. Abstract Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems.
Look Ma, No For-Loops: Array Programming With NumPy – Real Python
Introduction to the CARLA simulator: training a neural network to ... Training neural network models on data gathered with two deterministic controllers and my non-deterministic self. Before we start, the source code for this whole project is available here. If you…
Inside Waymo's Secret World for Training Self-Driving Cars ...
Autonomous-Driving/SOTA For DRL&AD.md at master - GitHub Urban Driving with Conditional Imitation Learning, Wayve, 2019, paper. Learning to Drive from Simulation without Real World Labels, Wayve, 2018, paper. End-to-End Model-Free Reinforcement Learning for Urban Driving using Implicit Affordances, valeo, 2019, paper. OUR TOP TIPS FOR CONDUCTING ROBOTICS FIELD RESEARCH, 2019, blog

How Drive.ai Is Mastering Autonomous Driving With Deep ...
Learning to Drive from Simulation without Real World Labels Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. Training and evaluating methods purely in simulation is often "doomed to succeed" at the desired task in a simulated environment, but the resulting models are incapable of operation in the real world.
Berkeley DeepDrive | We seek to merge deep learning with ...
Learning to Drive from Simulation without Real World Labels Learning to drive in the simulation domain presents innumerous advantages: avoiding human casualties and expensive crashes, changing lightning and weather conditions, and reshaping structural...
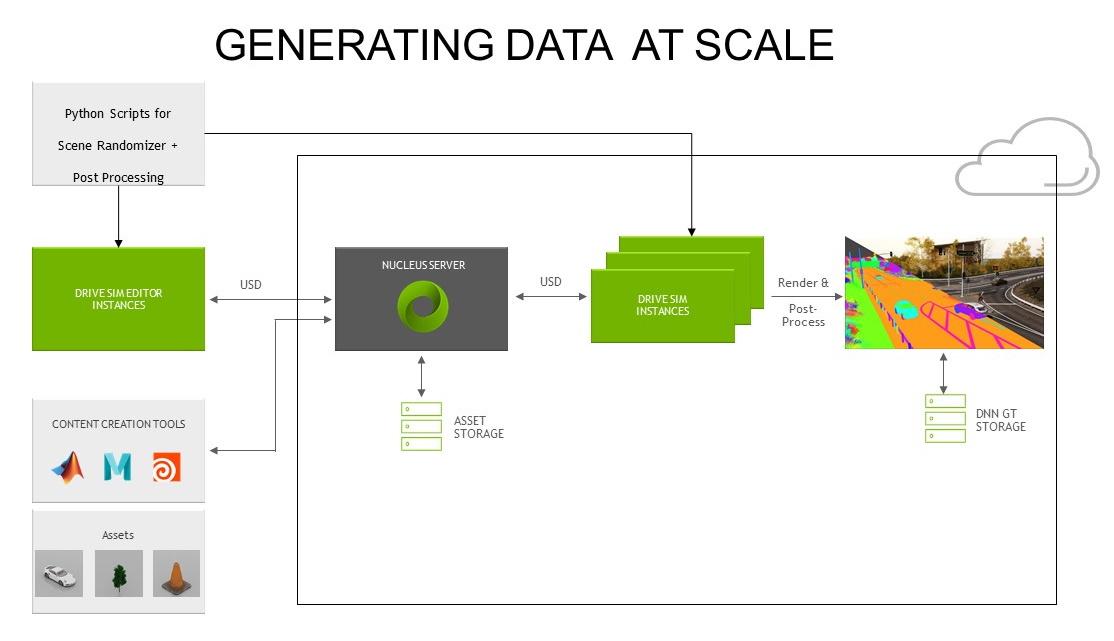
What Is Synthetic Data? | NVIDIA Blogs
Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels By Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall Get PDF (3 MB) Abstract Simulation can be a powerful tool for understanding machine learning systems

sim2real on Twitter: "Learning to Drive from Simulation ...
towardsdatascience.com › federated-learning-a-stepFederated Learning: A Step by Step Implementation in ... Apr 10, 2020 · Real world federated data held by clients are mostly NON independent and identically distributed (IID). For example, we could have replicated this scenario by constructing our client shards above such that each comprises of images from a single class — e.g client_1 having only images of digit 1, client_2 having only images of digit 2 and so on.

Enabling Real-World Object Manipulation with Sim-to-Real ...
Research Roundup: Training with Synthetic Data - Datagen Learning to Drive from Simulation without Real World Labels (2018) Cambridge university researchers, working with a corporate team, teach a car to drive in a cartoon-like simulator. The novel idea was to teach the car to transcribe real-world data into its simulation-based understanding (real2sim) instead of attempting the reverse (sim2real).
![PDF] Learning to Drive from Simulation without Real World ...](https://d3i71xaburhd42.cloudfront.net/1254306ab0e1c8e179d9f31b4b9ea0cef7398bd8/4-Figure5-1.png)
PDF] Learning to Drive from Simulation without Real World ...
PDF Urban Driving with Conditional Imitation Learning - GitHub Pages Recently, model-based reinforcement learning (RL) for learning driving from simulated LiDAR data by [19], but it has yet to be evaluated in real urban environments. Approaches with low dimensional data have shown promising results in off-road track driving [20]. Model-free RL has also been studied for real-world rural lane following [21].

Simulation Training, Real Driving | Wayve
论文笔记 Learning to Drive from Simulation without Real World Labels 文章对自己的贡献进行了总结:. 1、We present the first example of an end-to-end driving policy transferred from a simulation domain with control labels to an unlabelled real-world domain. 2、利用模拟器,我们可以学习到超越在真实世界中常见驾驶分布的策略,消除了对多个摄像头或者数据增强 ...
This super-realistic virtual world is a driving school for ...
archive.ics.uci.edu › ml › datasetsUCI Machine Learning Repository: Data Sets The aim is to reflect the nuances and heterogeneity of real data. Data can be generated in .csv, ARFF or C4.5 formats. 132. Steel Plates Faults: A dataset of steel plates’ faults, classified into 7 different types. The goal was to train machine learning for automatic pattern recognition. 133.

Learning to Drive from Simulation without Real World Labels ...
› publication › 305174476(PDF) Discovery Learning in the Classroom - ResearchGate Apr 01, 2006 · PDF | Tell me and I will forget Show me and I may remember Involve me and I will understand. Confucius, 450 B.C. | Find, read and cite all the research you need on ResearchGate

Playing Grand Theft Auto can teach autonomous cars how to ...
archive.ics.uci.edu › ml › datasetsUCI Machine Learning Repository: Data Sets The task is intended as real-life benchmark in the area of Ambient Assisted Living. 336. Open University Learning Analytics dataset: Open University Learning Analytics Dataset contains data about courses, students and their interactions with Virtual Learning Environment for seven selected courses and more than 30000 students. 337.

Sim2Real: Learning to Drive from Simulation without Real ...
Self-driving Research in Review: ICRA 2019 Digest - Medium Learning to Drive from Simulation without Real World Labels Paper from Wayve — Training a self-driving car in simulation as opposed to real-world is cheaper, faster and safer; however, such ...
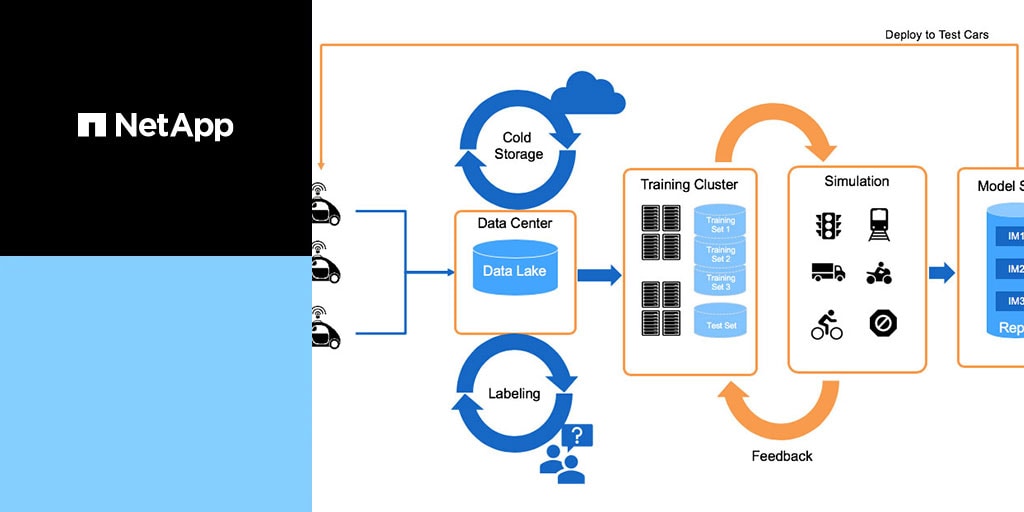
How to Build a Data Pipeline for Autonomous Driving | NetApp Blog
Publications - Home Jeffrey Hawke et al. Urban Driving with Conditional Imitation Learning. Proceedings of the International Conference on Robotics and Automation (ICRA), 2020. ... Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall. Learning to Drive from Simulation without Real World Labels. Proceedings of the International Conference on ...

Frontiers | AR DriveSim: An Immersive Driving Simulator for ...
Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels Authors: Alex Bewley Queensland University of Technology Jessica Rigley University of Cambridge Yuxuan Liu Jeffrey Hawke Wayve Abstract...
Inferring Concept Drift Without Labeled Data
› section › learningThe Learning Network - The New York Times Mentor Texts How to Write a 100-Word Narrative: A Guide for Our Tiny Memoir Contest. Step-by-step directions for telling a meaningful, interesting and short true story from your life — with 25 ...

Simulation Training, Real Driving | Wayve
Deep Reinforcement Learning for Autonomous Driving: A Survey

Simulation Training, Real Driving | Wayve

Learning to Drive from Simulation without Real World Labels ...

Car Driving School Simulator
![PDF] Learning to Drive from Simulation without Real World ...](https://d3i71xaburhd42.cloudfront.net/1254306ab0e1c8e179d9f31b4b9ea0cef7398bd8/4-Figure4-1.png)
PDF] Learning to Drive from Simulation without Real World ...

Integrating Machine Learning with Human Knowledge - ScienceDirect

Deep Learning Summit London 2019 - Day 1 - HackMD

Research Roundup: Training with Synthetic Data - Datagen

ADAS & Autonomous Vehicle Simulation Software | Ansys

Virtual-Based Safety Testing for Self-Driving Cars from ...
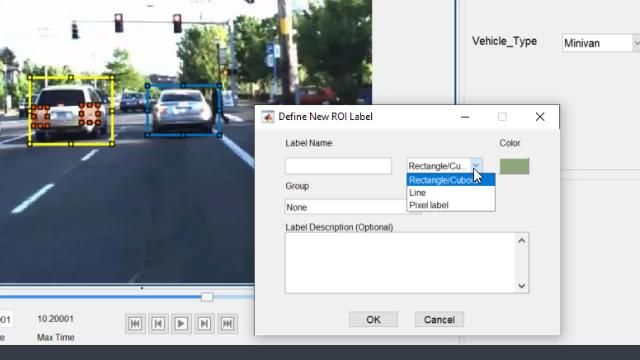
Automotive - Automated Driving Systems - MATLAB & Simulink

The big new idea for making self-driving cars that can go ...
MIT system trains driverless cars using reinforcement ...

This super-realistic virtual world is a driving school for ...
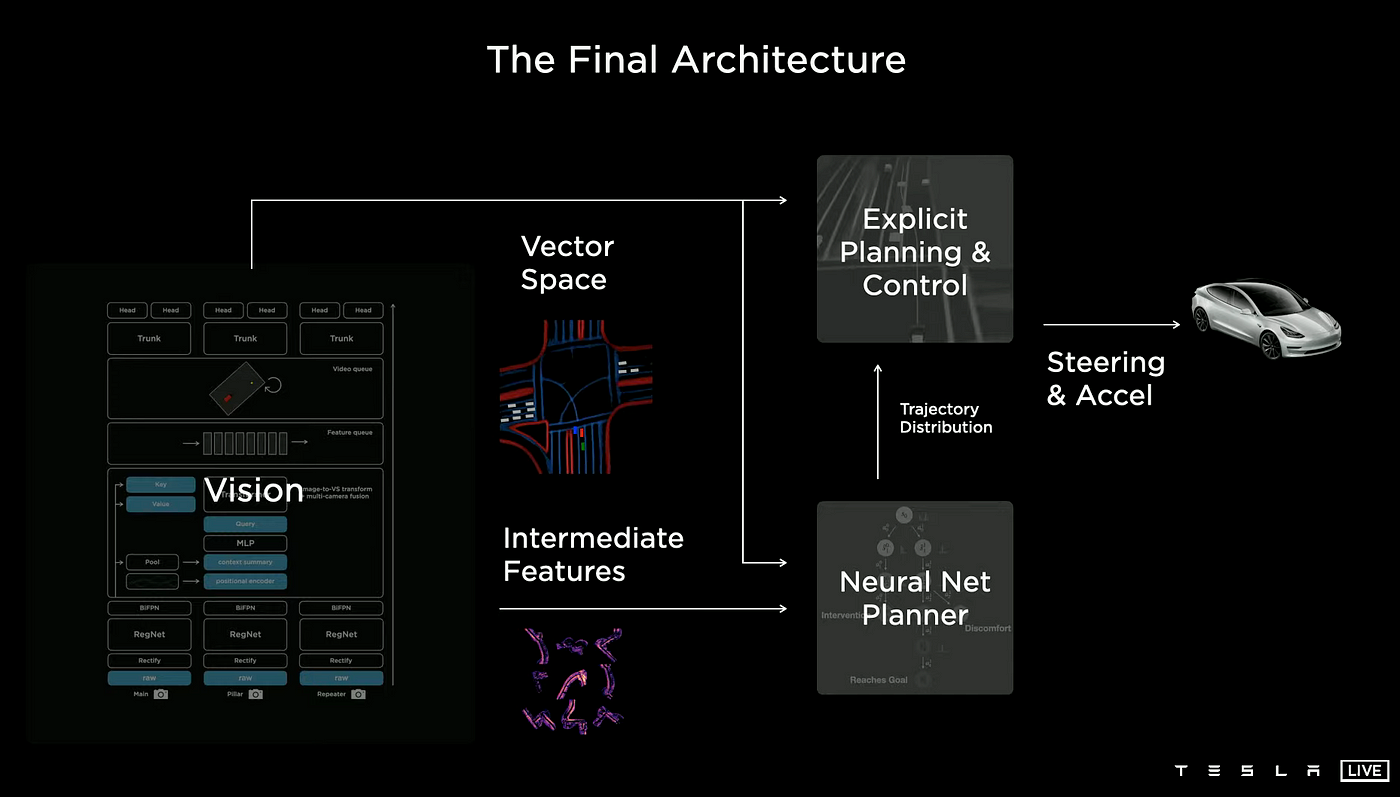
Deep Understanding Tesla FSD Part 4: Auto Labeling ...

Deep learning for object detection and scene perception in ...

Sim2Real: Learning to Drive from Simulation without Real ...
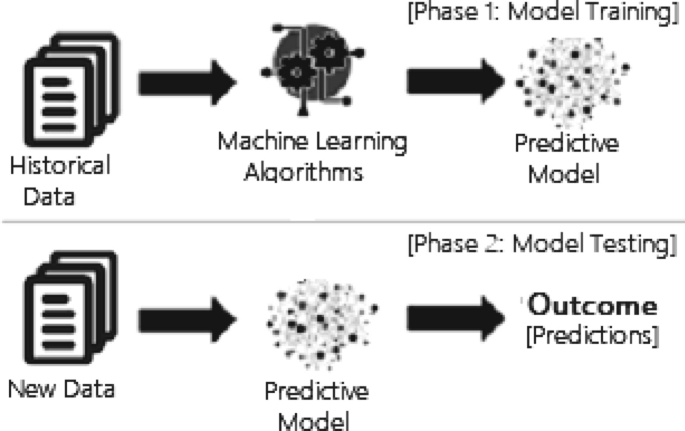
Machine Learning: Algorithms, Real-World Applications and ...

TranSim™ Truck Driving Simulator | L3Harris™ Fast. Forward.
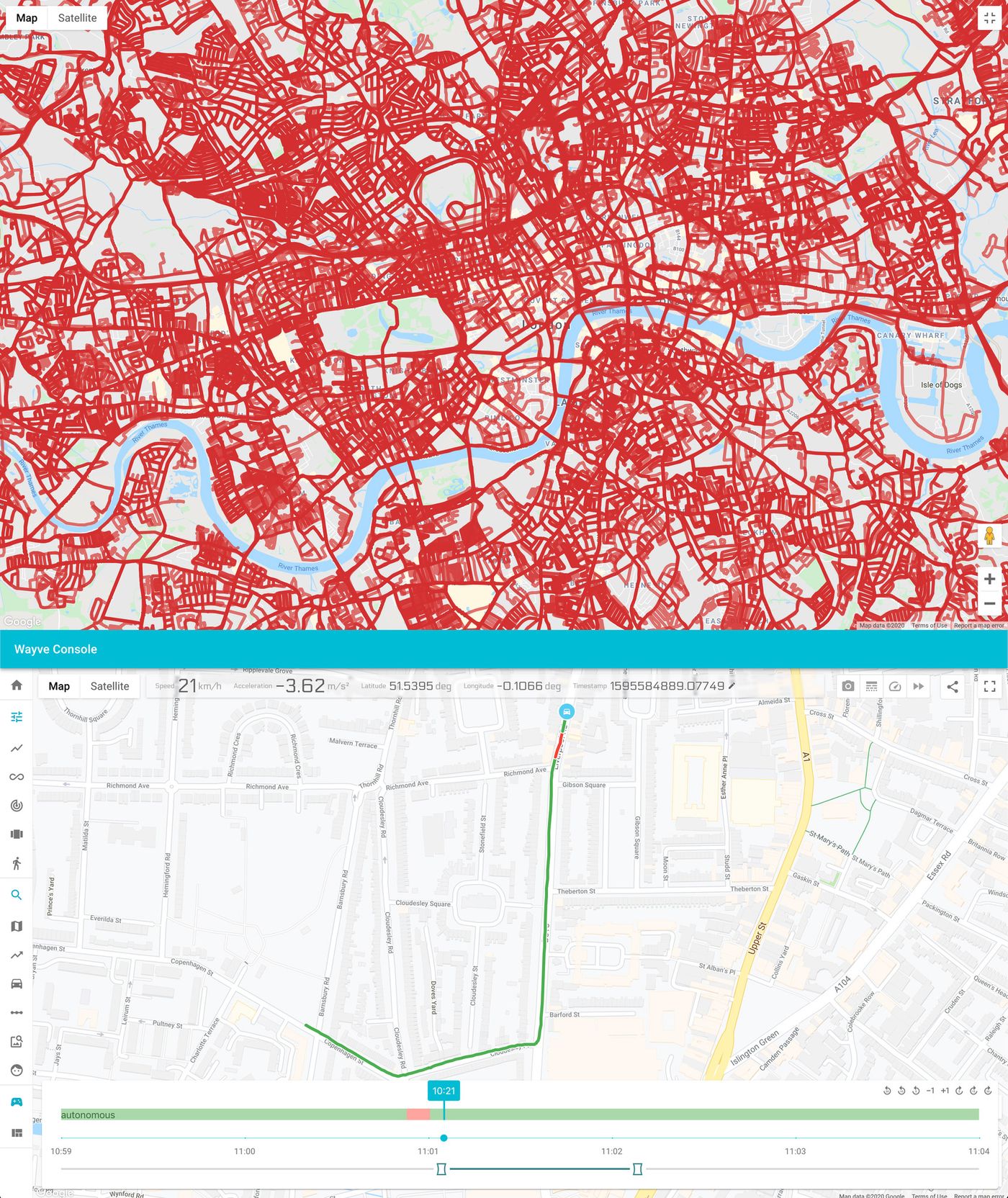
Technology | Wayve

Car Racing Highway Driving Simulator, real parking driver sim speed traffic deluxe 2022
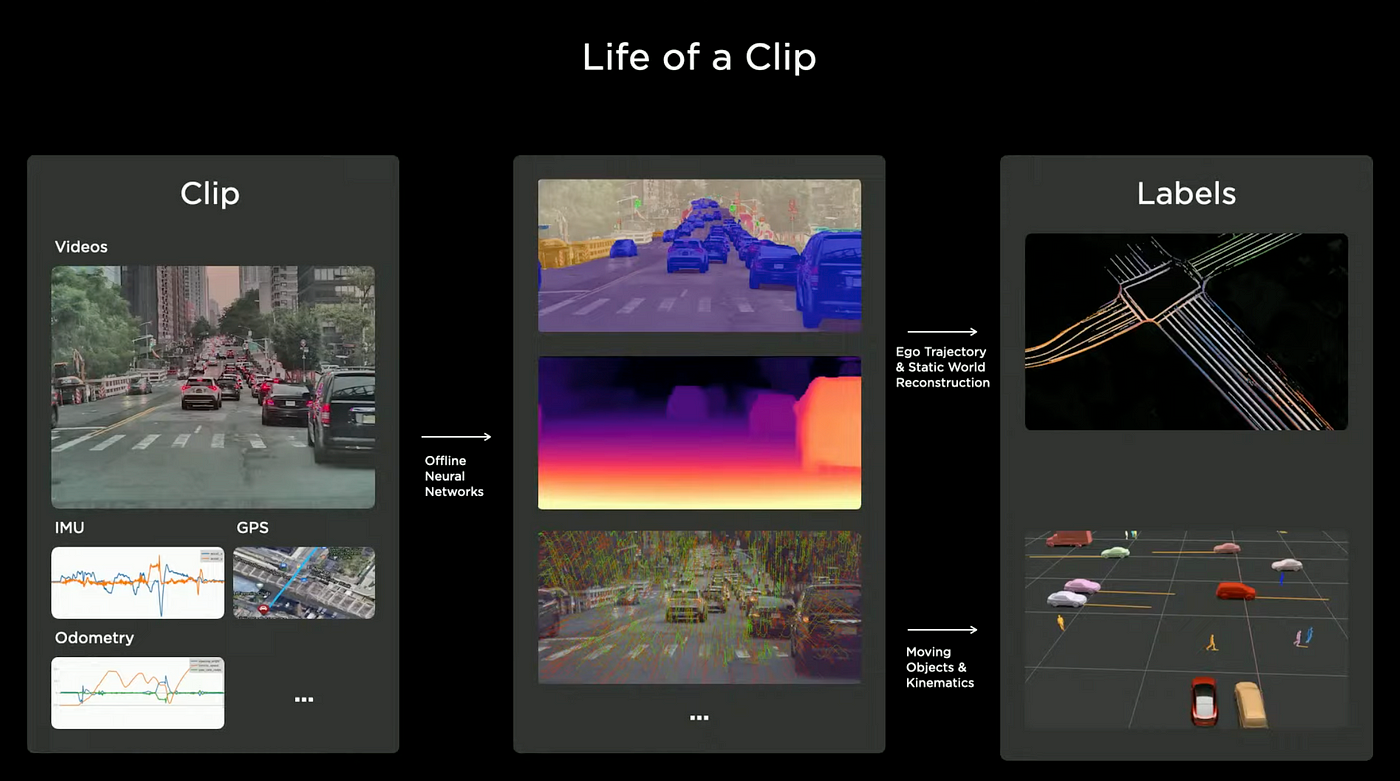
Deep Understanding Tesla FSD Part 4: Auto Labeling ...

PDF) Learning to Drive from Simulation without Real World Labels

Deep Understanding Tesla FSD Part 4: Auto Labeling ...
sim2real on Twitter: "Learning to Drive from Simulation ...
Post a Comment for "45 learning to drive from simulation without real world labels"